数学 --《线性代数》奇异值分解(SVD)
奇异值分解可以看作是对特征值分解思想的推广:它不要求矩阵是方阵,而是将一个 \(m \times n\) 的矩阵分解成三个矩阵相乘。
- 矩阵分解动画讲解,其实也很简单! https://www.bilibili.com/video/BV1zqYpzwEaQ/
- 代数明珠–奇异值分解(SVD)生动动画演示! https://www.bilibili.com/video/BV1n5YyztEVk/
- 用可视化看懂 SVD 奇异值分解 https://www.bilibili.com/video/BV1Rrp3zYE3i/
特征值分解
特征值和特征向量
\[Av=\lambda v\]其中 A 是一个 n 维的方阵,v 是 n 维特征向量,\(\lambda\) 是个数字(特征值)。每一个特征值都对应一个特征向量。
上面式子也可以理解为:A 为对 v 向量的变换矩阵,由于 \(\lambda\) 仅仅是一个数值,所以这个变换 只有拉伸没有旋转 。
特征值分解
如果方阵 A 满足可对角化条件,就可以找到足够多的线性无关特征向量。只有实对称矩阵、正规矩阵这类特殊矩阵,特征向量才通常能取成正交。每一个都满足表达式 \(Av=\lambda v\)。 那么,就可以写成如下形式

V 是特征向量组成的矩阵,\(\zeta\) 是对角线上元素为特征值的的对角阵。方程两边同时乘以 V 矩阵的逆得到:
\[A=V\zeta V^{-1}\]如果矩阵 A 不是方阵,那么就用到了奇异值分解。
奇异值分解
定义
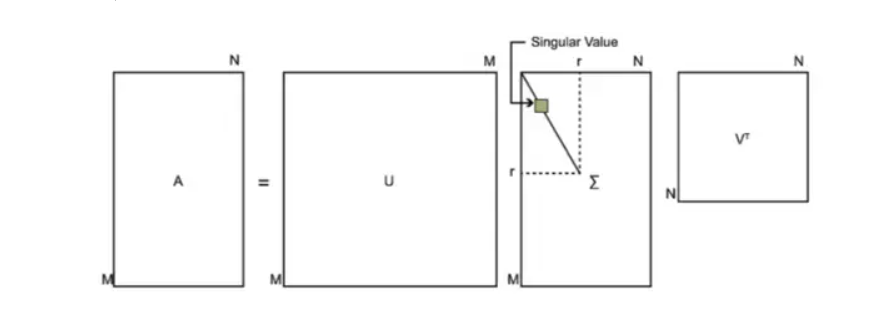
\[A=U\Sigma V^\top\]A 是将要分解的大小为 \(m \times n\) 的矩阵。U 是 m 维的方阵。V 是 n 维的方阵。 \(\Sigma\) 是除主对角线元素以外全为 0 的矩阵,大小为 \(m \times n\)。示意图如下:
求解
还是按照特征值求解的思路,现在的矩阵 A 不是方阵,如果将其乘以自己的转置矩阵就变成了方阵, 是方阵就可以求其特征值和特征向量。
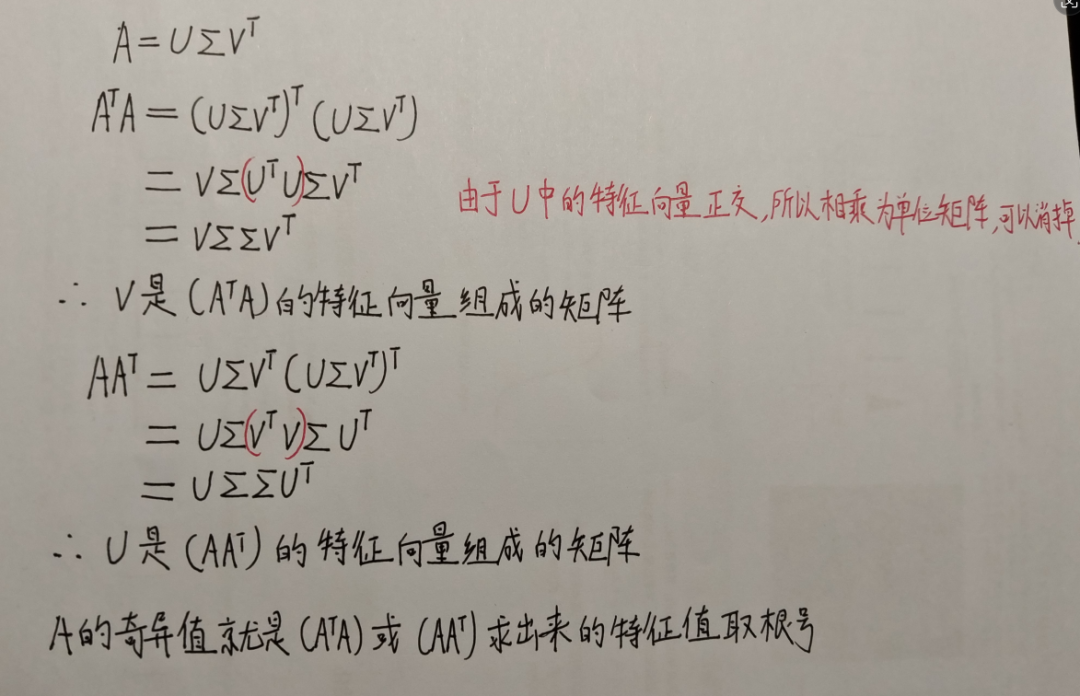
\(\Sigma\) 主对角线上的元素就是矩阵对应的奇异值,按从大到小的顺序排列, 奇异值越大代表其对应的特征向量包含的特征越多。利用这一点,可以对数据进行降维,压缩等应用。
奇异值分解代表的物理意义
一个矩阵可以理解为一个线性变换,如果矩阵是对角阵,那么对应的变换是 拉伸 。 如果矩阵是正交矩阵,那么对应的变换是保持长度和角度的正交变换,可理解为旋转或反射。 所以,奇异值分解就是将一个线性变换分解成先做一个正交变换,后拉伸 / 压缩,最后再做一个正交变换的过程。

为什么一般的线性变换不能只用“拉伸”(对角矩阵)来表示,而一定要引入“旋转”?
为什么一般的线性变换不能只用“拉伸”(对角矩阵)来表示,而一定要引入“旋转”?
从 几何自由度 和 线性代数结构 两条线解释。
1️⃣ “直接拉伸”在数学上意味着什么?
“只拉伸、不旋转”对应的矩阵形式是:
\[A = D\]其中 \(D\) 是一个 对角矩阵 :
\[D = \begin{pmatrix} \lambda_1 & 0 & \cdots \\ 0 & \lambda_2 & \cdots \\ \vdots & & \ddots \end{pmatrix}\]几何意义是:
- 沿着 固定的坐标轴方向
- 分别缩放(拉伸 / 压缩)
👉 关键限制: 拉伸方向必须是当前坐标轴方向,而且彼此正交
2️⃣ 但一般的线性变换“拉伸方向”并不对齐坐标轴
现实中的线性变换 \(A\) 往往:
- 把一个方向映射到 斜着的方向
- 拉伸方向 不是 原坐标轴
- 不同方向之间还可能发生“混合”
举个 2D 的例子:
\[A = \begin{pmatrix} 1 & 1 \\ 0 & 1 \end{pmatrix}\]这是一个 剪切(shear) 变换:
- x 方向会“带着 y 一起跑”
- 没有任何坐标轴方向是“纯拉伸”的
👉 你 找不到一个坐标系 ,能让它在原坐标下表现为“只拉伸”
3️⃣ SVD 的关键洞察:
👉 “那我先换一套正交坐标系不就行了?”
这正是 SVD 的本质。
\[A = U \Sigma V^\top\]几何解释:
- $V^\top$ : 把输入空间 旋转 到一个“合适的坐标系”
- $\Sigma$ : 在这个新坐标系中 纯拉伸
- $U$ : 再把结果 旋转 到输出空间
👉 核心点:
不是不能拉伸,而是要在“对的方向”上拉伸
4️⃣ 为什么“两个旋转 + 一个拉伸”是最省事的?
这是一个 自由度匹配 的问题。
在 n 维空间中:
- 一般线性变换: 👉 $n^2$ 个自由度
- 对角矩阵(纯拉伸): 👉 只有 $n$ 个自由度
- 正交矩阵(旋转 / 反射): 👉 $n(n-1)/2$ 个自由度
👉 刚好补齐所有自由度
所以:
- “只拉伸”不够表达力
- 对方阵而言,“拉伸 + 两次正交变换”刚好能表达所有线性变换
5️⃣ 直觉版总结一句话
一般线性变换不是“沿坐标轴拉伸”,而是“沿某些斜着的正交方向拉伸”。
SVD 的旋转只是帮你把坐标轴转到这些“真正的拉伸方向”上。
6️⃣ 一句话终极答案
奇异值分解中的旋转并不是多余的,它们用于将线性变换对角化到合适的正交基下;只有在这些特征方向上,线性变换才能表现为纯拉伸。
参考资料快照
- 机器学习笔记 -- 机器学习资源(进行中) | 26 Jul 2025
- 数学 -- 生成模型数学 · 概率论基础 | 27 Sep 2024
- 数学 --《线性代数》奇异值分解(SVD) | 04 Apr 2024
- 数学 --《概率论与数理统计》宋浩老师(已完成) | 22 Mar 2024
- 数学 -- 难懂的数学(已完成) | 10 Sep 2022
- 数学 --《线性代数》宋浩老师(已完成) | 23 Aug 2022
- 数学 --《高等数学》同济版 宋浩老师(已完成) | 13 Aug 2022
- 机器学习笔记 -- 线性代数 & 微积分 & 概率论与统计学(唐宇迪) | 01 Sep 2020
- 机器学习笔记 -- 环境搭建 & 数学基础 | 29 Aug 2020
 .
.