图形学笔记 -- OpenGL 图形学 / 坐标系统
OpenGL 坐标系统。开创者没用整数,就用 -1 到 1 的浮点数,装下了整个数学,也装下了整个 UNIVERSE,可以无穷大,也可以无穷小。
- https://learnopengl-cn.readthedocs.io/zh/latest/01%20Getting%20started/08%20Coordinate%20Systems/
- https://www.mdeditor.tw/pl/pZYE
- https://mp.weixin.qq.com/s/0HZgyZra90LQLFAq6dQJ9A
理论
主要有 5 个不同的坐标系统:
- 局部空间 (Local Space,或者称为物体空间 (Object Space))
- 世界空间 (World Space)
- 观察空间 (View Space,或者称为视觉空间 (Eye Space))
- 裁剪空间 (Clip Space)
- 屏幕空间 (Screen Space)
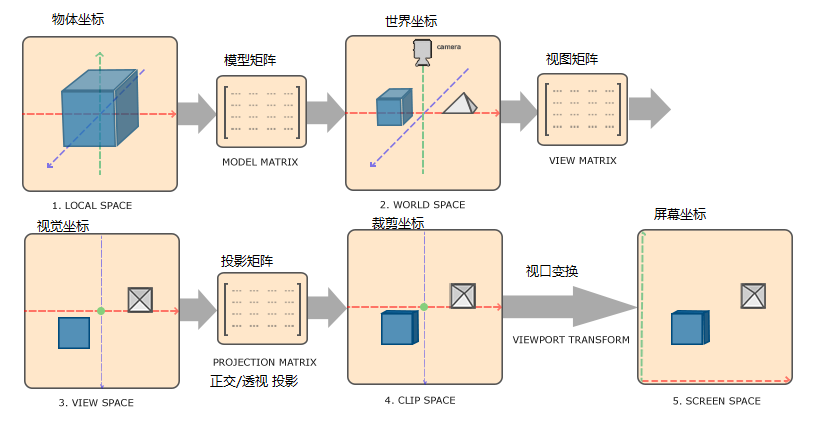

在上图中,OpenGL 定义了后三个坐标系(裁剪坐标、NDC 坐标、屏幕坐标),前三个坐标(物体坐标、世界坐标、摄像机坐标)是为了用户方便而自定义的坐标。
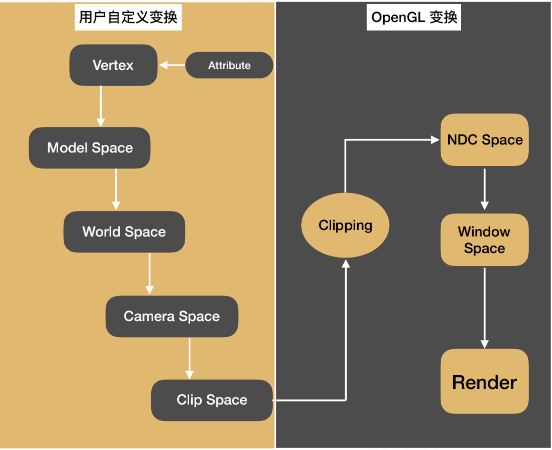
OpenGL 在每次顶点着色器运行之后,希望可见的顶点都可以转化为标准化设备坐标 (Normalized Device Coordinate, NDC),也就是说,每个顶点的 x,y,z 坐标都应该在(-1.0,1.0)之间,超出这个坐标范围的顶点都将不可见。通常我们会自定一个坐标的范围,之后再在顶点着色器中将这些坐标转换为标准化设备坐标。然后将这些标准化的坐标传入光栅器,变换为屏幕上的二维坐标或者像素。
物体坐标到世界坐标,通常包含位移、旋转和缩放;世界坐标到视觉坐标,主要由相机的位移和旋转决定。最终要换算到 NDC 立方体内,显卡完成后继工作。 glm::mat4 默认按列主序存储;这是内存布局和索引约定,不等于把数学矩阵转置:
// 列优先记法
| 0 4 8 12 |
| 1 5 9 13 |
| 2 6 10 14 |
| 3 7 11 15 |
示例
原始坐标:
float vertices[] = {
-0.5f,-0.5f,0.0f, // left,down
0.5f,-0.5f,0.0f, // right,down
0.5f, 0.5f,0.0f, // right,top
-0.5f, 0.5f,0.0f, // left,top
};
glm::mat4 model=glm::mat4(1.0f);
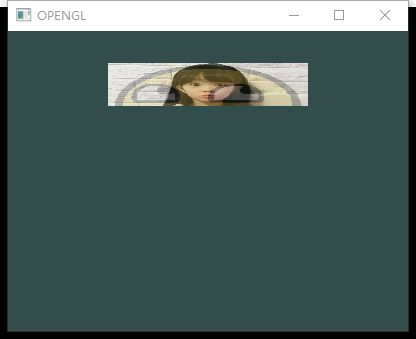
// 没有设置投影矩阵时,相当于直接在裁剪空间中观察;这里绕 x 轴逆时针旋转 55°
model=glm::rotate(model,glm::radians(55.0f),glm::vec3(1.0f,0.0f,0.0f));
glm::mat4 view = glm::mat4(1.0f);
// 往上平移 0.5f,往后平移 1.0f。
// 只能看到半截,因为默认是一个 [-1,1] 的立方体正交,另外半截超出边界了。
view=glm::translate(view,glm::vec3(0.0f,0.5f,-1.0f));
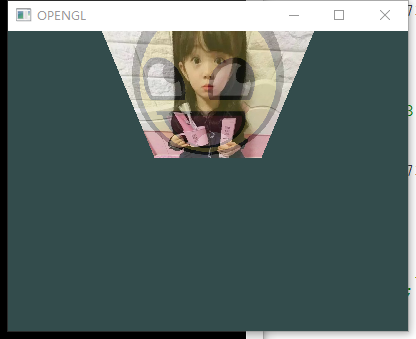
glm::mat4 projection = glm::mat4(1.0f);
// 最终结果,是一个摄像机在原点的透视。
// 摄像机位置应该在 原点。
projection=glm::perspective(glm::radians(90.0f),800.0f/600.0f,0.1f,10.0f);
相机控制
右手坐标系。在 OpenGL 常见相机约定中,视线前方通常是 -Z 方向,+Z 指向相机后方。

pitch():俯仰,将物体绕 X 轴旋转(localRotationX)
yaw():航向,将物体绕 Y 轴旋转(localRotationY)
roll():横滚,将物体绕 Z 轴旋转(localRotationZ)
四元数概念及其应用
什么是四元数
$i$,$j$,$k$ 为虚数。
$Q = w + xi + yj + zk$
其中 $w$ 是实数,而 $x$,$y$,$z$ 为复数。
另外一种常见的表达方式是:
$Q = [w, v]$
其中 $v=(x,y,z)$ 称为矢量部(虽然称为矢量,但是这个不是三维空间中的矢量,而是四维空间的,想象吧 L),$w$ 称为标量部。 使用一个单位四元数来描述方向,请记住必须是单位四元数才可以描述方向。
使用四元数来避免 Gimbal Lock
基本思路如下:
- 使用一个四元数来标识一个方向。
- 创建一个临时的四元数来标识当前方向到新方向的变化。
- 右乘临时的四元数和初始四元数,结果是一个合并了两个四元数的新的四元数。
- 将四元数转换成矩阵。
Shader 四元数旋转

#define Quaternion float4
inline Quaternion SetAxisAngle(float3 axis, float radian)
{
float sinValue = 0;
float cosValue = 0;
sincos(radian * 0.5, sinValue, cosValue);
Quaternion q = Quaternion(sinValue * axis.xyz, cosValue);
return q;
}
inline float3 MultiplyQP(Quaternion rotation, float3 p)
{
float3 xyz = rotation.xyz * 2;
float3 xx_yy_zz = rotation.xyz * xyz.xyz;
float3 xy_xz_yz = rotation.xxy * xyz.yzz;
float3 wx_wy_wz = rotation.www * xyz.xyz;
float3 res;
res.x = (1 - (xx_yy_zz.y + xx_yy_zz.z)) * p.x + (xy_xz_yz.x - wx_wy_wz.z) * p.y + (xy_xz_yz.y + wx_wy_wz.y) * p.z;
res.y = (xy_xz_yz.x + wx_wy_wz.z) * p.x + (1 - (xx_yy_zz.x + xx_yy_zz.z)) * p.y + (xy_xz_yz.z - wx_wy_wz.x) * p.z;
res.z = (xy_xz_yz.y - wx_wy_wz.y) * p.x + (xy_xz_yz.z + wx_wy_wz.x) * p.y + (1 - (xx_yy_zz.x + xx_yy_zz.y)) * p.z;
return res;
}
参考资料快照
- https://learnopengl-cn.readthedocs.io/zh/latest/01%20Getting%20started/08%20Coordinate%20Systems/
- https://www.mdeditor.tw/pl/pZYE
- https://mp.weixin.qq.com/s/0HZgyZra90LQLFAq6dQJ9A
- http://www.songho.ca/opengl/gl_projectionmatrix.html
- http://www.songho.ca/opengl/gl_sphere.html
- http://www.cppblog.com/kongque/archive/2010/08/18/123824.html
- https://www.qiujiawei.com/understanding-quaternions/
- https://chengkehan.github.io/QuaternionShader.html
LearnOpenGL 系列文章
- 图形学笔记 -- OpenGL 图形学 / 视差贴图(Parallax Mapping) | 07 Jan 2021
- 图形学笔记 -- OpenGL 图形学 / 高级光照 阴影 shadowMapping | 24 Dec 2020
- 图形学笔记 -- LearnOpenGL CN 学习笔记(原书复习) | 21 Dec 2020
- 图形学笔记 -- OpenGL 图形学 / 高级 OpenGL:Stencil Test(模板测试) | 16 Dec 2020
- 图形学笔记 -- OpenGL 图形学 / 高级 OpenGL:深度测试、面剔除、帧缓冲 等 | 15 Dec 2020
- 图形学笔记 -- OpenGL 图形学 / 高级光照 Blinn-Phong & 阴影 | 14 Dec 2020
- 图形学笔记 -- OpenGL 图形学 / 模型加载 | 11 Dec 2020
- 图形学笔记 -- OpenGL 图形学 / 坐标系统 | 11 Dec 2020
- 图形学笔记 -- OpenGL 图形学 / 冯氏光照模型 | 09 Dec 2020
- 图形学笔记 -- 计算机图形学 OPENGL 入门 | 11 Nov 2020
参考资料快照
 .
.