编程与调试 C++ -- OpenCL 2.0 异构计算 笔记
OpenCL 同步函数
barrier(CLK_LOCAL_MEM_FENCE); barrier(CLK_GLOBAL_MEM_FENCE); http://cjld.github.io/2013/07/31/openclasync/
Arm Mali Bifrost OpenCL Developer Guide Version 1.0
https://developer.arm.com/documentation/101574/0100/
NVIDIA OpenCL SDK Code Samples
https://developer.nvidia.com/opencl
- OpenCL Bandwidth Test
- developer.download.nvidia.com/compute/DevZone/OpenCL/Projects/oclBandwidthTest.zip
- Test the bandwidth for DEVICE_TO_HOST
- host to device HOST_TO_DEVICE
- device to device transfers DEVICE_TO_DEVICE
- clEnqueueCopyBuffer
- pinned memory(Create a host buffer)PINNED
- clCreateBuffer(cxGPUContext, CL_MEM_READ_WRITE | CL_MEM_ALLOC_HOST_PTR, memSize, NULL, &ciErrNum);
- standard host alloc PAGEABLE
- h_data = (unsigned char *)malloc(memSize);
- allocate device memory
- clCreateBuffer(cxGPUContext, CL_MEM_READ_WRITE, memSize, NULL, &ciErrNum);
- 直接访问:DIRECT
- clEnqueueWriteBuffer(cqCommandQueue, cmDevData, CL_FALSE, 0, memSize, h_data, 0, NULL, NULL);
- map 访问:(Get a mapped pointer)MAPPED
- void* dm_idata = clEnqueueMapBuffer(cqCommandQueue, cmDevData, CL_TRUE, CL_MAP_WRITE, 0, memSize, 0, NULL, NULL, &ciErrNum);
OpenCL Programming Guide
https://rocmdocs.amd.com/en/latest/Programming_Guides/Opencl-programming-guide.html
OpenCL Programming Guide
https://rocmdocs.amd.com/en/latest/Programming_Guides/Opencl-programming-guide.html https://www.nersc.gov/assets/pubs_presos/MattsonTutorialSC14.pdf
https://www.khronos.org/registry/OpenCL/specs/opencl-1.2.pdf https://www.khronos.org/files/opencl-1-2-quick-reference-card.pdf
Use the Memory Hierarchy effectively • Organize your computation so it puts the most frequently used data in faster memory … optimized of course around the available size.
OpenCL 是一个小而美的东西,比 OpenGL 要简单很多,妙不可言。( ̄▽ ̄)" OpenGL 需要图形学的知识储备,OpenCL 不太需要。
OpenCL 2.0 异构计算 [第三版 ] (Heterogeneous Computing with OpenCL 2.0)
OpenCL 是一个异构编程架构,其管理者是非盈利技术组织 Khronos Group 。OpenCL 是一个应用开发框架,在其框架下开发的应用,能够在不同的硬件供应商的设备上运行。
- 第一版的 OpenCL (1.0) 标准在 2008 年正式发布,并出现在苹果 Mac OSX 雪豹系统当中。
- 2009 年,AMD 宣布其旗下的显卡支持 OpenCL 。IBM 也在该年宣布,其 XL 编译器在 Power 架构的处理器下支持 OpenCL 。
- 2010 年, Khronos Group 发布了 OpenCL 1.1 标准。
- 2011 年,发布了 OpenCL 1.2 标准。本书的第一版介绍了很多 OpenCL 1.2 的特性。
- 2013 年, Khronos Group 发布了 OpenCL 2.0 标准。
- OpenCL 3.0 处于最终模式(2020-09-30)。 OpenCL 1.2 是强制性的。所有 OpenCL 2.x 模块和新的 3.0 模块都是可选的。新的首选语言是具有许多 C++ 17 功能的 OpenCL 的 C++。
OpenCL 2.0 较大的改变有如下内容:
- 共享虚拟内存 —— 主机和设备端可以共享复杂数据结构指针,比如:树和链表;以减少花在数据结构转换上的精力。
- 动态并行 —— 可以在不用主机代码参与的情况下,进行内核的加载,为的就是减小加载内核所产生的瓶颈。
- 统一地址空间 —— 这样同样的函数就可以处理 GPU 和 CPU 上的数据,以减少编程的难度。
- C++ 原子操作 —— 工作项可以跨越工作组共享数据和设备,可以让更多的算法使用 OpenCL 实现。
OpenCL 1.2 是支持的最广泛的版本,我采用了这个版本。
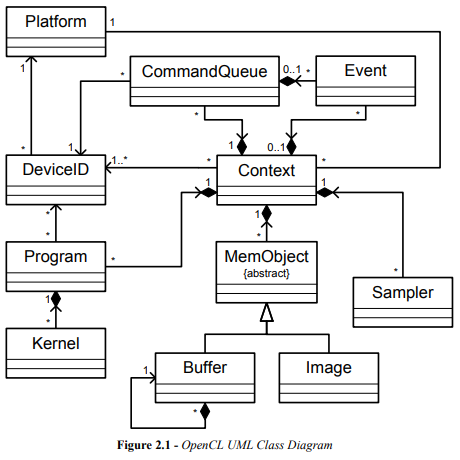
OpenCL 主机端内存模型
讨论 OpenCL 主机端的内存模型,包括资源和内存管理。
图像对象就有些不同,其数据的布局或存放方式在硬件上进行过一些优化,这样指针就很难直接一个一个的访问对应的数据,并且硬件上的数据布局方式对于开发者来说是不可见的。这样,内核端只能使用内置函数对图像对象进行访问。因为 GPU 设计之初就是为了处理图形任务,所以 GPU 对图像数据访问效率已有较高优化。图像有三个优势:
- GPU 上的层级缓存和数据流结构就是为了优化访问图像类型数组所准备
- GPU 驱动会在硬件层面上优化图像数据的排布,从而提升访问图像数据的效率,尤其是二维图像模式
- 硬件支持图像是一个很复杂的数据访问过程,在这个过程中硬件会将一些存储的数据进行压缩
图像对象和数组对象最大的区别,就是图像对象支持的格式。图像格式包括通道序和通道类型。 通道顺序定义了有多少通道需要使用 —— 例如,CL_RGB,CL_R 或 CL_ARGB。通道类型就是要选择通道内数据存储的格式,从 CL_FLOAT 到充分利用内存的 CL_UNORM_SHORT_565(其将一个 16 比特字打包后放入内存)。当内核代码要访问这些数据时,读取到的数据结果都上转换成标准的 OpenCL C 类型数据。图像格式支持的列表可以通过 clGetSupportedImageFormats() 获取。
异构系统下解析 OpenCL
讨论 OpenCL 在三种完全不同的异构平台上的表现,这三个异构平台包括:
- AMD FX-8350 CPU
- AMD Radeon R9 290X GPU
- AMD A10-7850K APU。
OpenCL C 内核语言也实现了 C 语言中著名的 printf() 函数。printf() 函数也可以用来进行调试,这种调试方式对于 C/C++ 开发者来说并不陌生。
API 实践
clCreateBuffer
https://blog.csdn.net/breakawayroad/article/details/9003632
GPU 内存可以虚拟化,驱动程序将在 / 不需要时从 GPU 交换内存。
CL_DEVICE_GLOBAL_MEM_SIZE CL_DEVICE_MAX_MEM_ALLOC_SIZE
OpenCL 中三种内存创建 image 的效率对比
https://www.cnblogs.com/willhua/p/10123398.html
同时,clEnqueueUnmapMemObject 和 memcpy 都很快,耗时分别为 0.015ms 和 0.0004ms 左右。 从测量结果来看,使用 ION 的方式,在各项速度上都是占优的。使用 OpenCL API 也比较接近。而使用 CL_MEM_USE_HOST_PTR 则会获得比较差的效果。
GPU 优化技术 - OpenCL 运行时 API 介绍
https://aijishu.com/a/1060000000293412
这里的文档都不错: https://deepinout.com/opencl/opencl-memory-object/opencl-image-descriptor.html
cl_image_format  The image format descriptor structure is defined as…
The image format descriptor structure is defined as…
OpenCL:图像处理基础 note
https://www.programminghunter.com/article/1125142473/
虽然对于图像也可以把它的像素数据当做一般的缓存数据来处理,但是如果把它当做图像来处理有如下好处:
- 在 GPU 中,图像数据是保存在特殊的全局内存中,即纹理内存,它和一般的全局内存不相同,它是被缓存的,用于高速访问处理。GPU 中有专门支持图像读写的硬件,使用内置读写函数可以充分发挥这个优势。
- 只要 OpenCL 支持该图像格式,那么就可以不用考虑图像格式的前提下使用读写图像数据的函数
- 可以使用采样器来配置读取图像中数据的的方式
- OpenCL 提供函数来获取图像相关信息,比如宽度等
图像插值算法总结
https://www.cnblogs.com/laozhanghahaha/p/12580822.html

| interpolation 选项 | 所用的插值方法 |
|---|---|
| INTER_NEAREST | 最近邻插值 |
| INTER_LINEAR | 双线性插值(默认设置) |
| INTER_AREA | 使用像素区域关系进行重采样。 它可能是图像抽取的首选方法,因为它会产生无云纹理的结果。 但是当图像缩放时,它类似于 INTER_NEAREST 方法。 |
| INTER_CUBIC | 4x4 像素邻域的双三次插值 |
| INTER_LANCZOS4 | 8x8 像素邻域的 Lanczos 插值 |
OpenCL: C++ 实现双线性插值图像缩放
https://blog.csdn.net/10km/article/details/50755584
用 OpenCL 实现图像缩放代码是比较简单的,因为 OpenCL 本身就支持双线性插值 下面是 kernel 代码 从 Mali OpenCL SDK 抄来的:/samples/image_scaling/assets/image_scaling.cl
Intel 显卡
if (!checkSuccess(clGetSupportedImageFormats(context, 0, CL_MEM_OBJECT_IMAGE2D, 0, NULL, &numberOfImageFormats)))
clGetSupportedImageFormats
参考资料快照
- http://cjld.github.io/2013/07/31/openclasync/
- https://developer.arm.com/documentation/101574/0100/
- https://developer.nvidia.com/opencl
- https://www.bookstack.cn/read/Heterogeneous-Computing-with-OpenCL-2.0/README.md
- https://blog.csdn.net/breakawayroad/article/details/9003632
- https://www.cnblogs.com/willhua/p/10123398.html
- https://aijishu.com/a/1060000000293412
- https://deepinout.com/opencl/opencl-memory-object/opencl-image-descriptor.html
- https://www.khronos.org/registry/OpenCL/sdk/2.0/docs/man/xhtml/cl_image_format.html
- https://www.programminghunter.com/article/1125142473/
- https://www.cnblogs.com/laozhanghahaha/p/12580822.html
- https://blog.csdn.net/10km/article/details/50755584
- 编程与调试 C++ -- OpenCL 2.0 异构计算 笔记 | 28 Apr 2022
- 编程与调试 C++ -- OpenCL & CUDA 初探 | 16 Apr 2022
 .
.